설치관련 오류는 해결해서 설치는 완료 되었습니다.
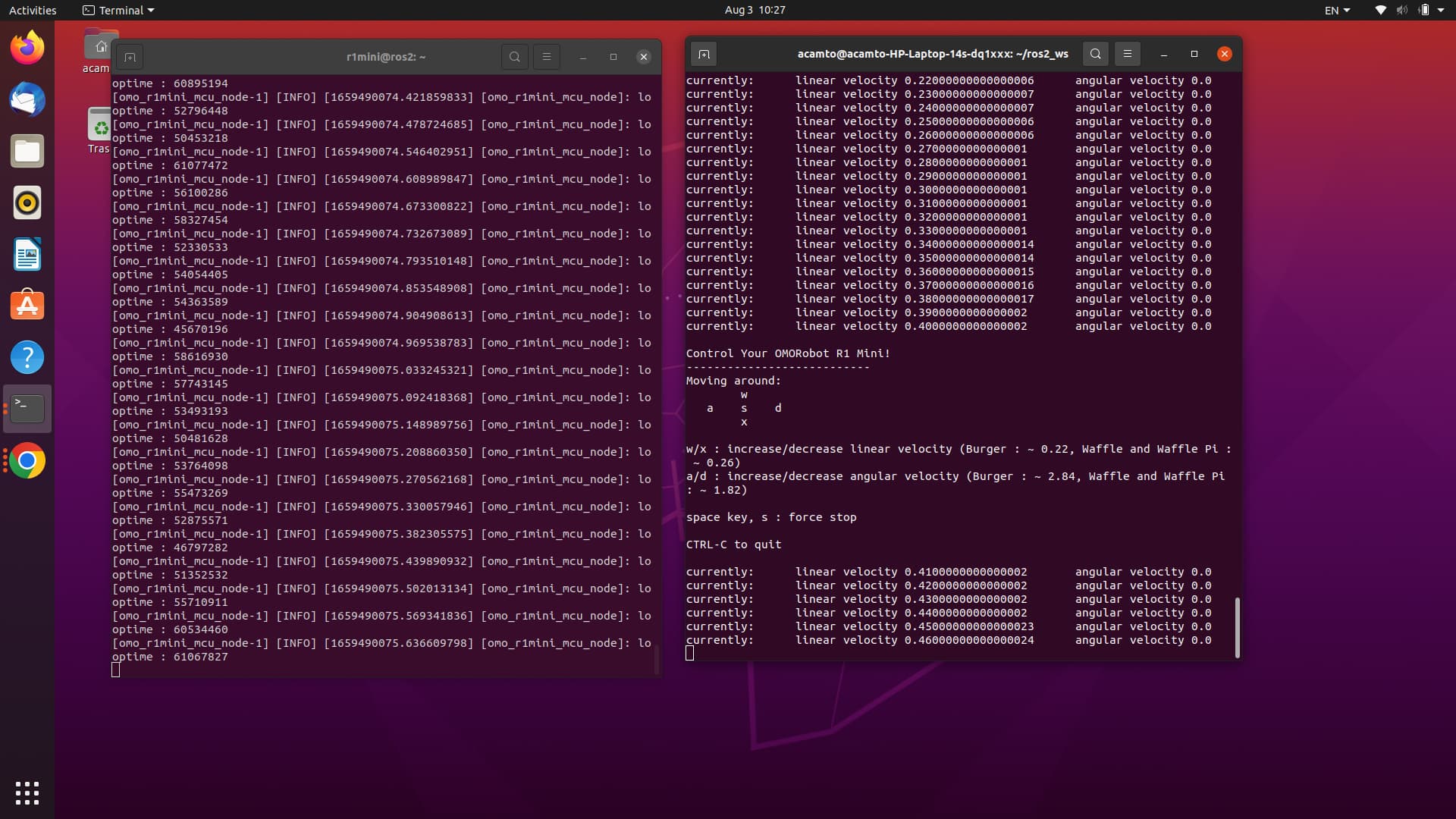
다만 하나의 host pc 터미널에는 ssh로 omoRobot에 원격 접속하여 omo_r1mini_bringup을 실행하고
다른 하나의 host pc 터미널에서는 omo_r1mini_teleop를 실행하였는데 원격 조종이 안되는 오류가 나타났습니다.
원격 조종 하기 위해서 따로 등록해야 할 것이 있나요?
먼저 ros2 topic list 명령으로 host pc에서 robot에서 publish 하는 메세지가 보이는지 확인해보시겠어요?
그리고 host pc와 robot은 어떻게 연결되어있나요?
VMware 같은 가상 머신을 사용중인 경우 연결이 제한될 수 있습니다.
답변 정말 감사합니다!!! 한번 확인해보도록 하겠습니다!
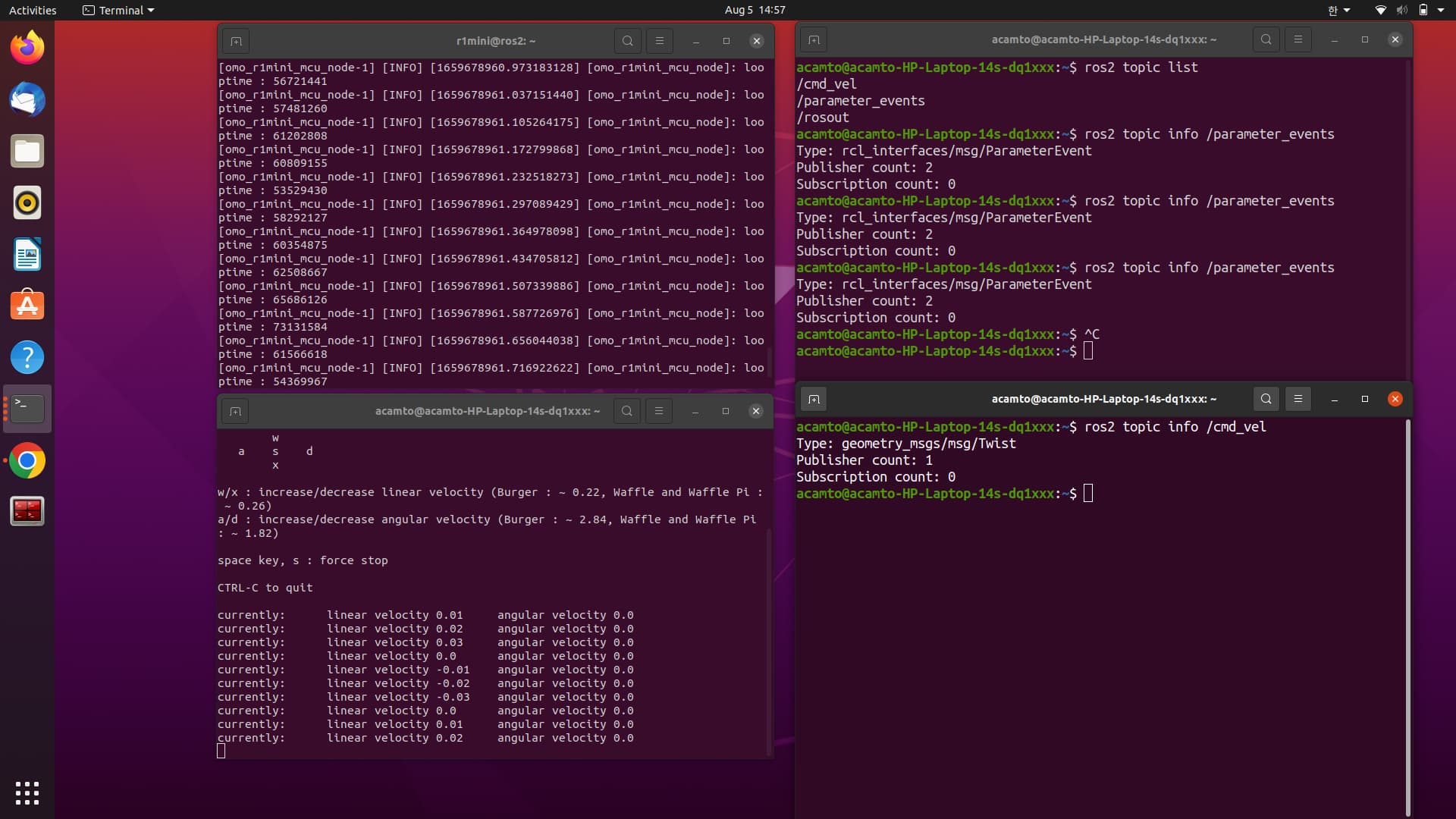
현재 ros2 topic list 상에서 /cmd_vel 메세지만 보이는걸로 봐서는
로봇의 node가 연결되지 않은거 같습니다.
원래는 /odom 등의 메세지가 같이 보여야 합니다.
혹시 r1mini에는 ros2 foxy 패키지가 설치되어있나요?
r1mini는 어떻게 구동하였나요?
혹시 호스트 PC는 어떻게 설치하셨나요? VMware의 가상 환경에 설치하는 경우 네트워크 공유 시 오류가 발생할 수 있습니다.
Host pc는 리눅스 20.04가 설치된 노트북을 하나 구해서 메뉴얼 대로 설치하였습니다!
robot에 ssh로 접근이 가능하고 모두 ros 2를 실행중인데
서로간에 ros 메세지 토픽이 보이지 않는 경우는 다음 2가지를 의심할 수 있습니다.
- .bashrc 에 ROS_DOMAIN_ID에 서로 다른 ID가 할당된 경우
- 네트웍에 방화벽이 설정된 경우 (회사, 건물에 설치된 네트웍에는 임의의 패킷을 전송하지 못하도록 방화벽이 설치되어 막힐 수 있습니다.)
1번은 .bashrc에 해당 export 항목을 삭제하거나 또는 ROS_DOMAIN_ID를 동일한 것으로 설정하면 됩니다.
2번인 경우 별도의 무선 공유기를 사용하시거나, 본인 휴대폰의 무선 테더링 기능을 사용해서 접속해보시는걸 권합니다.
넵 한번 시도해보도록 하겠습니다!
감사합니다!