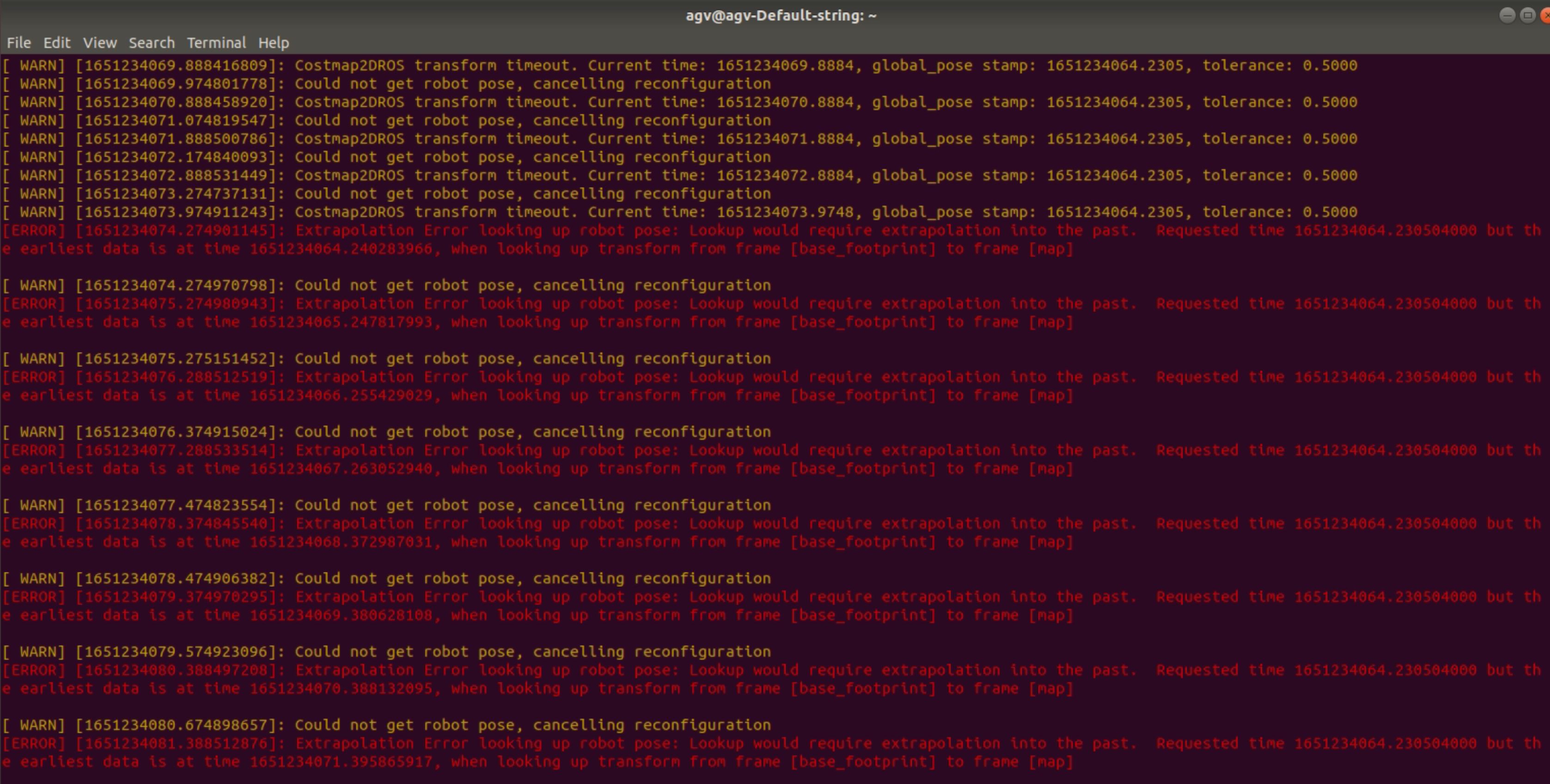
mapping과 navigation을 사용할 때 연결이 잘 될 때가 있고 대부분은 연결이 잘 안되는 것 같습니다.
다음과 같은 애러 코드가 발생하는데 수정방법을 알고 싶습니다.
안녕하세요~
어떤 명령어로 로봇을 구동하셨나요? 입력하신 명령어도 같이 올려주시면 문제 파악에 도움이 됩니다.
위 에러는 로봇의 pose 토픽이 들어오지 않는다는 의미입니다.
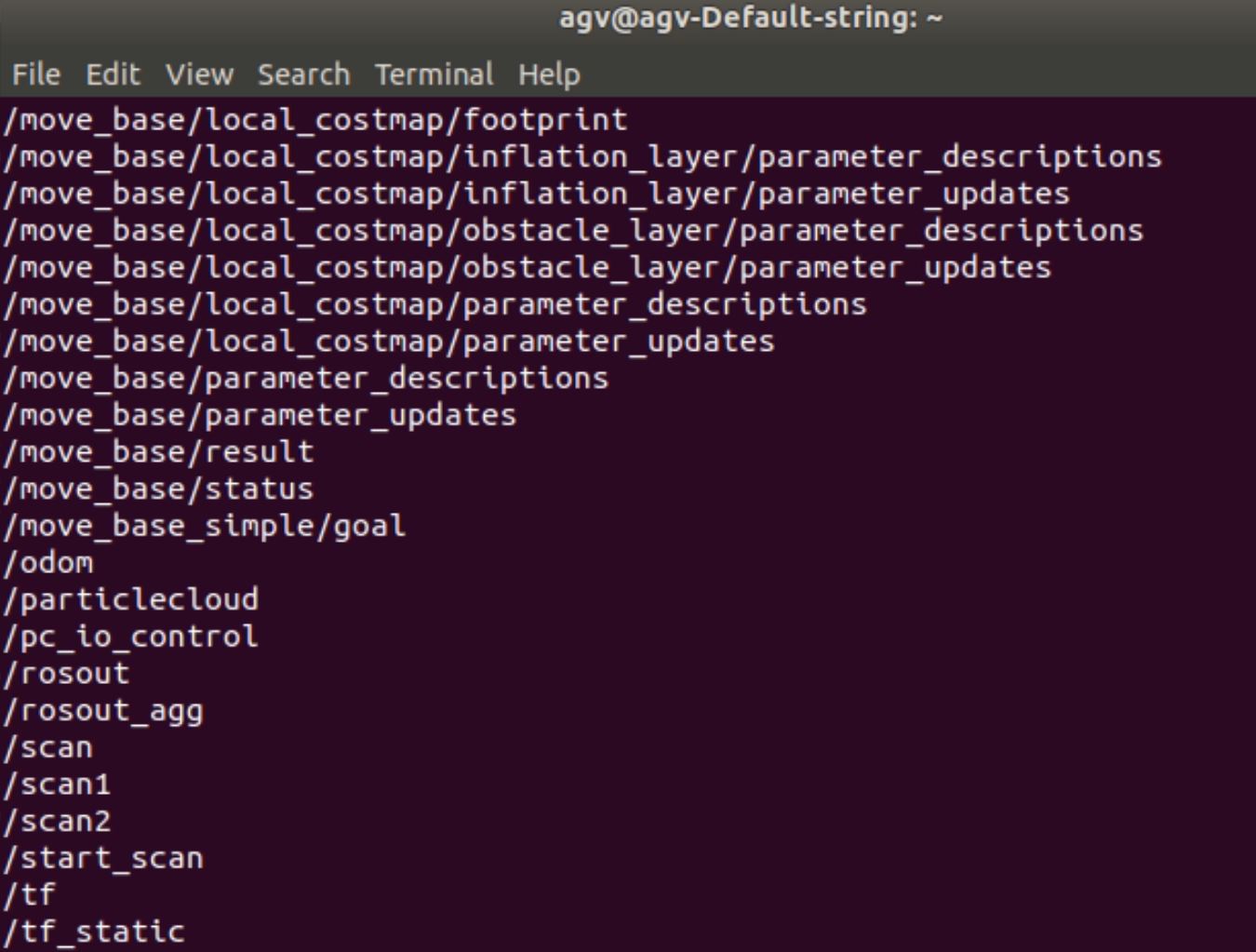
$ ros topic list 명령으로 odom 과 tf 가 전부 들어오고 있는지 확인하시기 바랍니다.
odom과 tf는 list에 나오고 있습니다.
명령어는 어떤 걸 올리면 될까요?
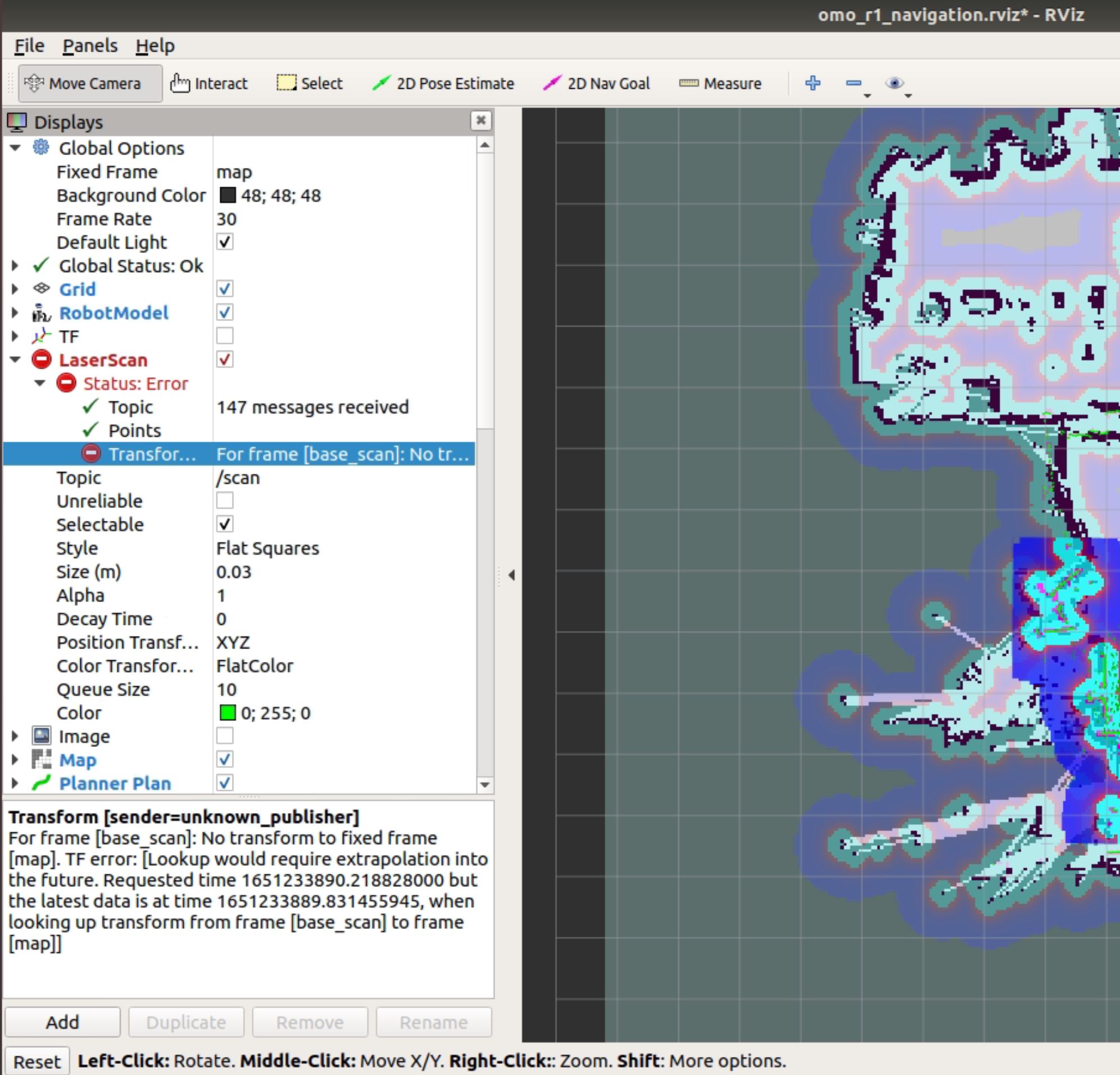
tf값을 확인해봤을 때 odom값의 변화는 잘 나오지만 map에서 odom값이 변화가 없어 보였습니다.
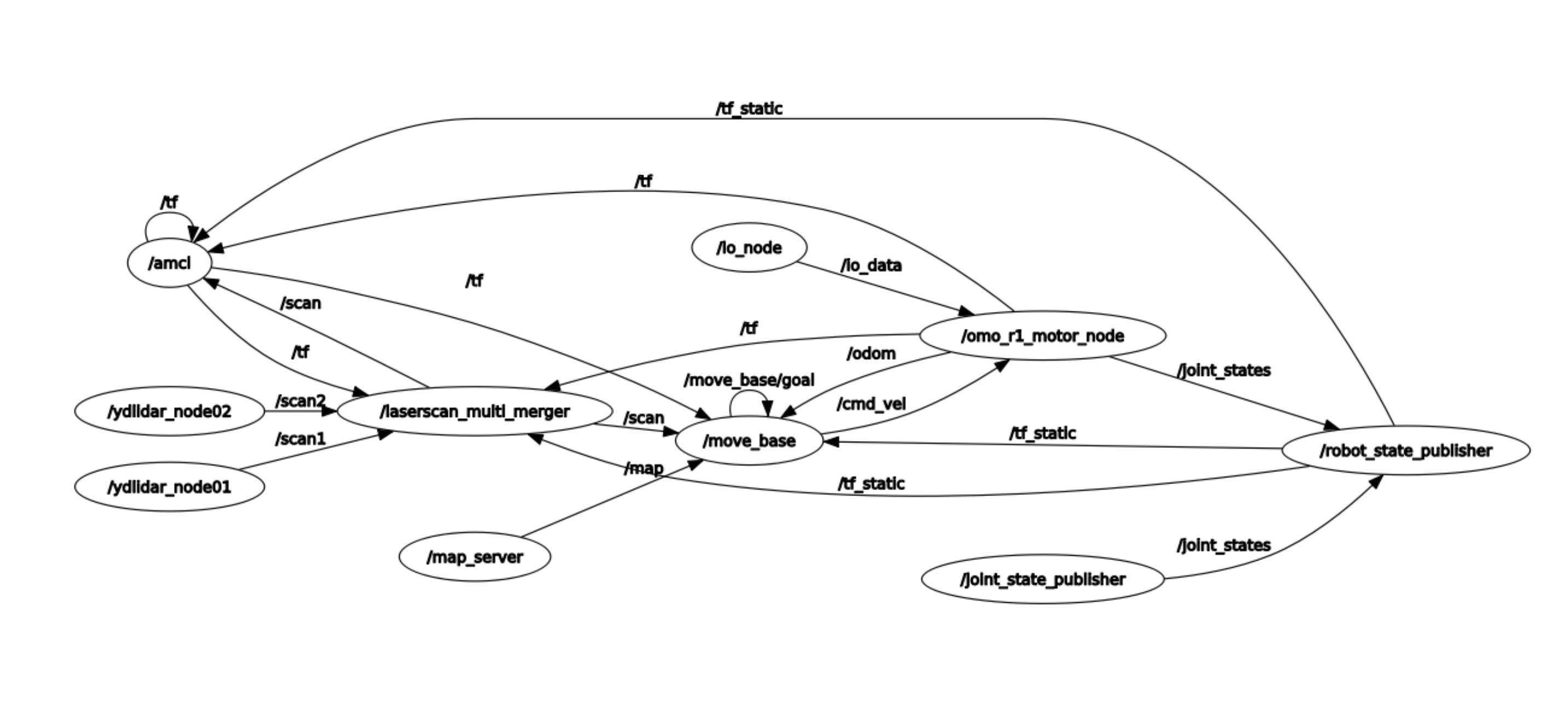
rqt_graph는 다음과 같습니다
혹시 아래 튜토리얼 과정을 따라서 진행하셨을까요?
한번 로봇의 catkin_ws/src/ 의 r1mini 패키지에서 git pull 명령으로 업데이트를 한번 해보시고
그래도 odom 데이터가 변경되지 않는지 확인 부탁드립니다.
또는 아래와 같이 윈도우용 데모 프로그램을 통해서 로봇의 정상동작 여부를 확인하실 수 있습니다.
r1 프로그램을 사용 중인데 같은 방식으로 가능한가요?
네비게이션을 실행했을때 처음 값은 잘 올라오다 map과 odom쪽 라이다 데이터가 멈추고
base_footprint 쪽에서는 라이다 값이 올라오는 것을 확인 가능합니다.
git pull 명령을 사용했을 시에 최신버전으로 나옵니다.
동작을 로봇 쪽에서만 하고 있는데 문제가 될려나요?
slam 을 했을시에는 다음과 같은 오류가 나옵니다.
[ WARN] [1651456883.898685861]: MessageFilter [target=odom ]: Dropped 98.49% of messages so far. Please turn the [ros.gmapping.message_filter] rosconsole logger to DEBUG for more information.
앗 자꾸 햇갈리네요 R1 이었군요… 이게 리눅스 usb 시리얼포트 호환성 문제인거 같은데요
아래 as신청서에 문제점을 간단히 정리해서 올려주세요.