안녕하세요. navigation 실행 중 로봇이 앞으로 가도록 goal을 설정했는데 뒤로 후진하는건 왜그런걸까요…?
- mapping 알고리즘은 gmapping이 아닌 cartographer를 사용하였습니다.
안녕하세요. navigation 실행 중 로봇이 앞으로 가도록 goal을 설정했는데 뒤로 후진하는건 왜그런걸까요…?
안녕하세요,
아래 방법대로 실행하신게 아니고 별도로 cartographer 패키지를 구동하신건가요?
cartographer에서 파라미터를 어떻게 입력하셨는지 등등 좀더 구체적인 정보가 있어야 도움을 드릴 수 있을꺼 같네요.
실행하신 코드를 같이 올려주시겠어요?
지도 생성은 위 링크에서 받아와서 실행하였고
navigation 실행은 메뉴얼 대로 진행하였습니다.
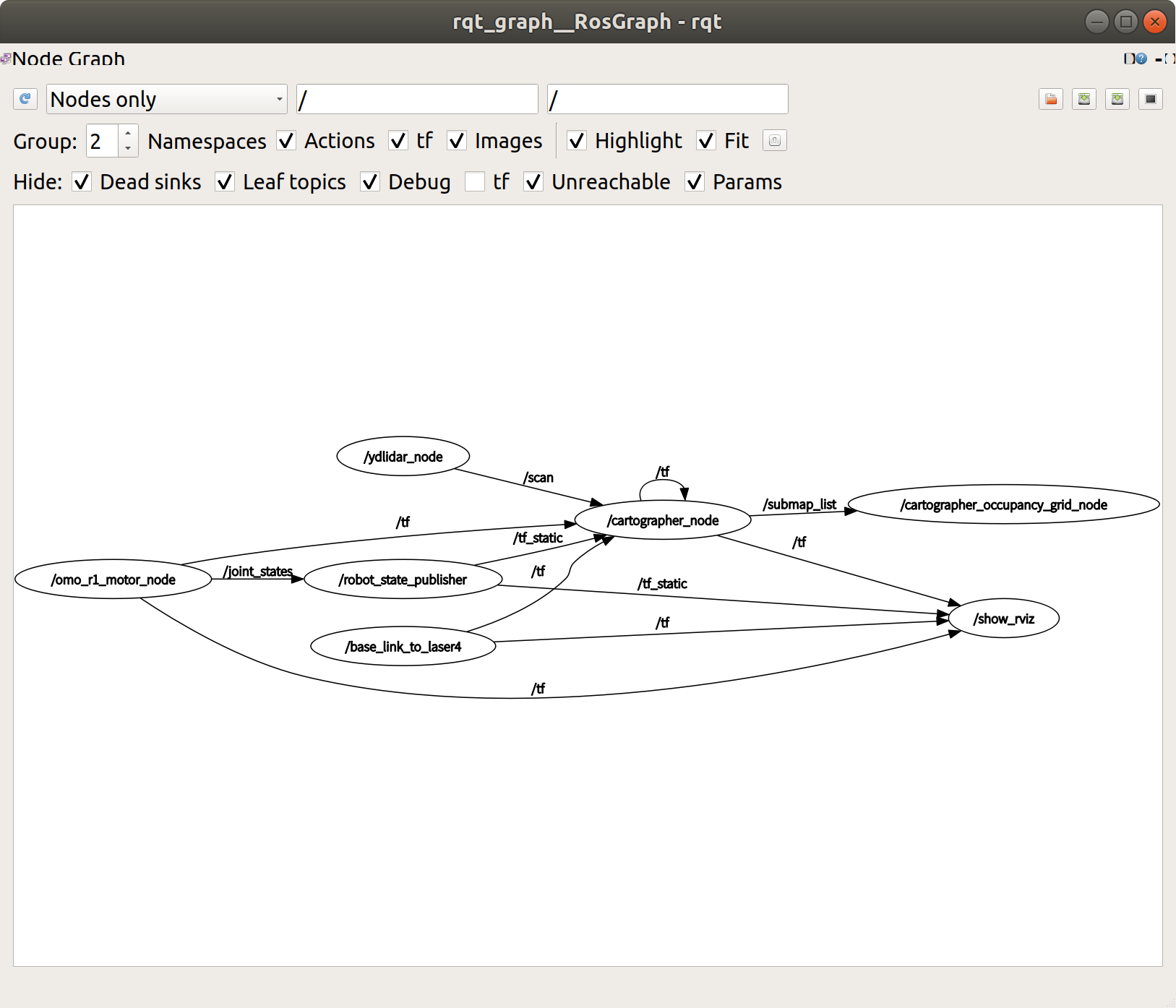
보내주신 코드에 urdf 를 설정하는 부분이 있습니다.
여기에서 라이다의 장착 방향이 실제 로봇과 동일하게 설정되었는지 확인해보시면 될꺼 같습니다.
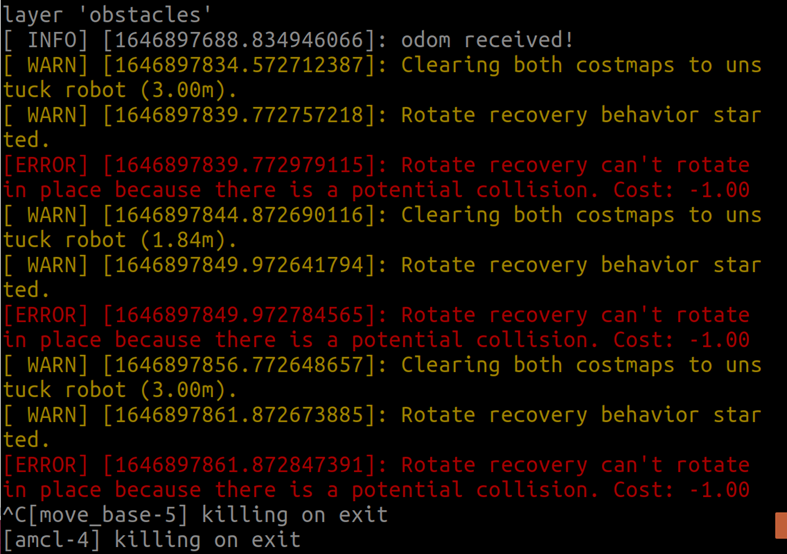
앞에 있는 물체가 정상적으로 인식되는지 아니면 혹시 반대로 돌아가서 있는건 아닌지요.
사진과 같은 오류가 발생합니다.
그래서 저 부분을 해결하고자 하는데
‘omo_r1/omo_r1_navigation/param/global_costmap_params.yaml’ 의 transfrom_torelance 값 만을 줄이면 되는 건가요…?