어찌저찌해서 PinkWink님의 패키지를 이용하여 ROS 관련 모두다 설치 후 YOLO 부분 catkin_make 혹은 catkin_build를 해도 문제가 생기는데 왜그러는건가요…?
SLAM 까지 모두 성공했는데 YOLO의 OpenCV DX11 Supporter 라는 에러가뜨네요…
그래서 나온데로 수정했는데도 문제가 계속 발생합니다.
도움을 요청하고싶습니다.
어찌저찌해서 PinkWink님의 패키지를 이용하여 ROS 관련 모두다 설치 후 YOLO 부분 catkin_make 혹은 catkin_build를 해도 문제가 생기는데 왜그러는건가요…?
SLAM 까지 모두 성공했는데 YOLO의 OpenCV DX11 Supporter 라는 에러가뜨네요…
그래서 나온데로 수정했는데도 문제가 계속 발생합니다.
도움을 요청하고싶습니다.
안녕하세요.
먼저 어떤 패키지를 사용하셨는지. 터미널에 어떤 에러가 뜨는지를 원문으로 올려주셔야 파악이 가능할꺼 같습니다.
ros 버전과 컴퓨터 환경 os정보 등도요.
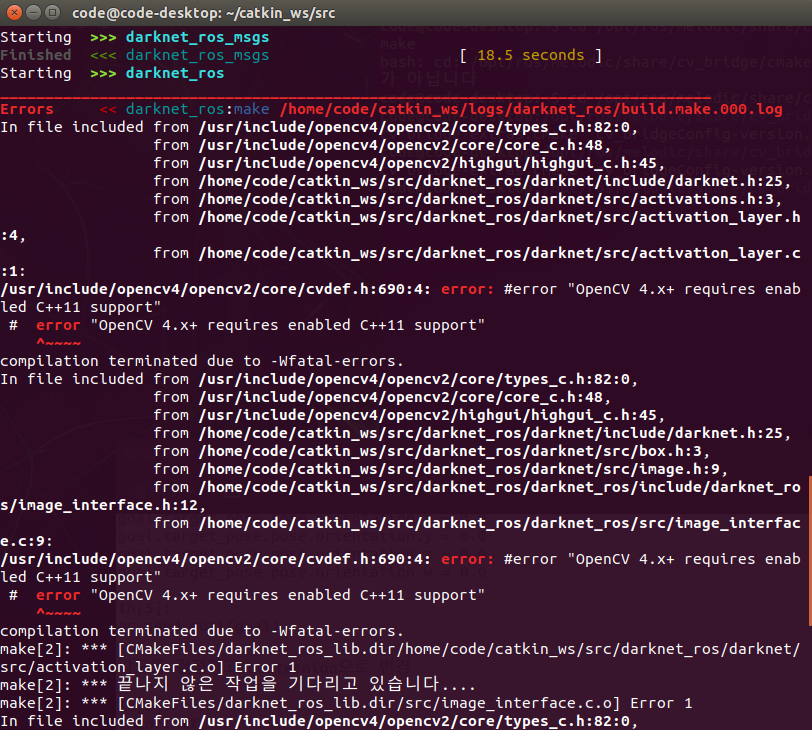
일단 gitbook에 있는 PinkWink님의 R1Mini YOLO 따라하기 부분중 darknet_ros 패키지를 빌드 중 문제가 발생하였습니다.
ROS 버전은 ROS1 이구요. 컴퓨터 환경은 Jetson Nano 해당 Gitbook 페이지에 있는 이미지를 사용하여 작업하였습니다. 현재 상황은 스크린샷과 같습니다.
해당 현상이 나타나는 것을 확인하였습니다.
opencv의 cmake 옵션에 다음을 추가해서 재설치를 시도하였으나 아직 해결은 안되는걸로 봐서 다른 문제가 있는거 같네요. 좀 더 시도 중입니다.
-D ENABLE_CXX11=ON \
추가적인 사항 적습니다. 기존에는 괜찮다가 Darknet_ros만 빌드하거나 빌드에 실패하거나 할경우 roslaunch jetson_camera jetson_camera.launch 명령어인 라즈베리 파이 카메라가 작동되지않습니다.
그래서 혹시몰라서 sudo systemctl restart nvargus-daemon의 명령어를 주고 다시 입력해보아도 안됩니다.
재시작을 하고 시도해보아도 작동이안됩니다.
이 현상도 같이 확인좀 부탁드립니다.
darknet_ros 빌드 문제는 실마리를 찾은거 같습니다.
바이너리 (apt)로 설치된 cv_bridge 가 문제인듯 합니다.
apt remove 명령으로 ros-melodic-cv-bridge를 하면 이 패키지를 의존하는 다른 패키지들도 같이 제거되므로 다음과 같이 입력하여 cv_bridge를 강제 삭제합니다.
$ sudo dpkg --remove --force-depends ros-melodic-cv-bridge
에러를 무시하고 진행합니다.
그리고 나서 catkin_ws/src 로 이동하여 cv_bridge 패키지를 다운로드합니다.
cd ~/catkin_ws/src
git clone https://github.com/ros-perception/vision_opencv.git -b melodic
그리고나서 catkin_ws에서 catkin_make를 수행합니다.
그렇게 하면 정상적으로 빌드가 됩니다.
아직 camera 문제는 확인중입니다.
확인 결과 cv_bridge를 다시 설치하면 문제가 해결되는거 같습니다.
현재 정상적으로 실행이 됩니다.
곧 업데이트된 os 이미지를 배포하겠습니다.
새로운 r1mini ROS-melodic OS 이미지는 다음 링크에서 다운로드할 수 있습니다.
설치해보시고 문제가 있으면 report 부탁드립니다.