
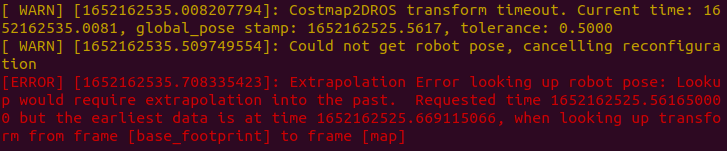
네비게이션 실행시 오류가 발생하고 2d navigation goal로 목적지를 지정해도 움직이지 않습니다.
안녕하세요,
네비게이션이 잘 안되서 속상하시겠지만 R1mini와 어떤 과정으로 연결하셨고
실행 명령은 어떻게 입력하셨는지 좀더 자세한 설명 부탁드립니다.
아래 과정에 나와있는대로 진행하신건가요?
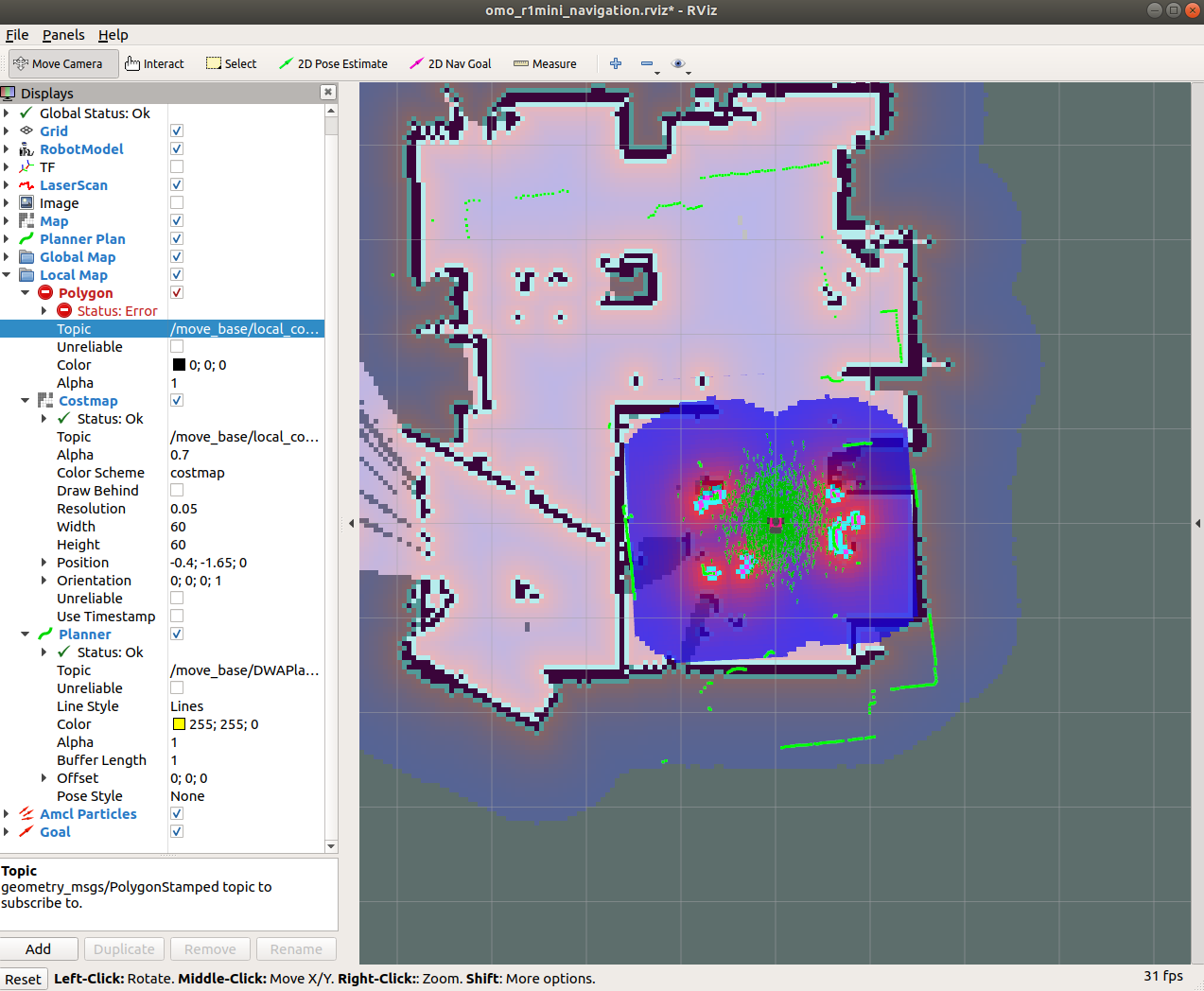
네 과정대로 진행했습니다. pc에서 네비게이션 패키지를 실행 한 후 위 사진처럼 pc 터미널에서 오류가 발생합니다.
pc에서 아래와 같이 입력했을때 odom 메세지가 정상적으로 출력되나요?
$ ros topic echo odom
네 잘출력되고 odom 값들이 잘변할 때도 있지만 움직이는 순간에 odom의 x, y 값들이 늦게 변할 때가 많습니다
네트웍 환경이 불안정한 경우 연결이 끊기거나 업데이트가 느리게 될 수 있습니다.
라우터에 동시에 여러대의 ROS node가 연결되면 주로 문제가 있습니다.
또는 git pull 명령으로 r1mini의 jetson nano의 ros 패키지를 업데이트 해보셨나요?
$ cd catkin_ws/src/omo_r1mini
$ git pull
두가지를 다 해보았는데도 안된다면 다른 문제가 있는거 같습니다. PC사양의 문제일수도 있고요. 한번 확인해보시기 바랍니다.
git pull로 업데이트도 완료 했습니다.
제가 학교 연구실에서 진행 중인데 같은 인터넷을 쓰는 대학원생들도 ROS를 사용하는데 이점이 문제가 될 수 있을까요? 문제가 된다면 어떤 문제가 발생하나요?
답변이 늦었네요. 혹시 해결 되셨나요?
만약 같은 라우터에서 여러 ROS를 사용중이라면 HOST PC와 로봇 PC의 bashrc 에 등록된 ROS_MASTER_URI 의 포트 번호를 다른걸로 변경해보시는건 어떨까요?
아마 지금 현재는 192.168.x.x:11311 로 되어있을텐데 이 값을 11312등으로 변경하면 충돌이 발생하지 않습니다.
아직 해결이 안됬습니다ㅜ
포트번호를 11312로 바꿔서 roscore를 실행해봤는데 자동적으로 재실행되면서 11311로 실행되었습니다.
네비게이션시 오류가 발생할때 bringup패키지를 실행하는 터미널에서 이런 오류 문구도 발생했습니다.
ValueError occupied during read robot status in update_robot state.
혹시 cartographer 를 사용했을때도 동일한 현상이 나타나나요?
아래 튜토리얼을 참고해보시기 바랍니다.