안녕하세요 해결해보려 하지만 도저히 되지가 않아서 문의드립니다.
ros melodic버전으로 Host PC에는 직접 패키지 설치완료,
로봇에선 이미지파일을 다운 후 git pull 한 후
roscore 실행 후 이 상태 이후로 아무런 동작이 되지 않습니다.
기초적인 질문인데 이걸 못하니 도저히 진도를 못나갔습니다 ㅠㅠ
감사합니다.
안녕하세요,
로봇이 제대로 움직이지 않아서 답답하시겠어요.
올려주신 사진을 보니 bringup은 잘 실행중인거 같습니다. 이 상태는 로봇을 구동하기 위한 준비가 된 것입니다.
하지만 로봇이 동작하기 위해서는 구동 명령이 전달되어야 합니다.
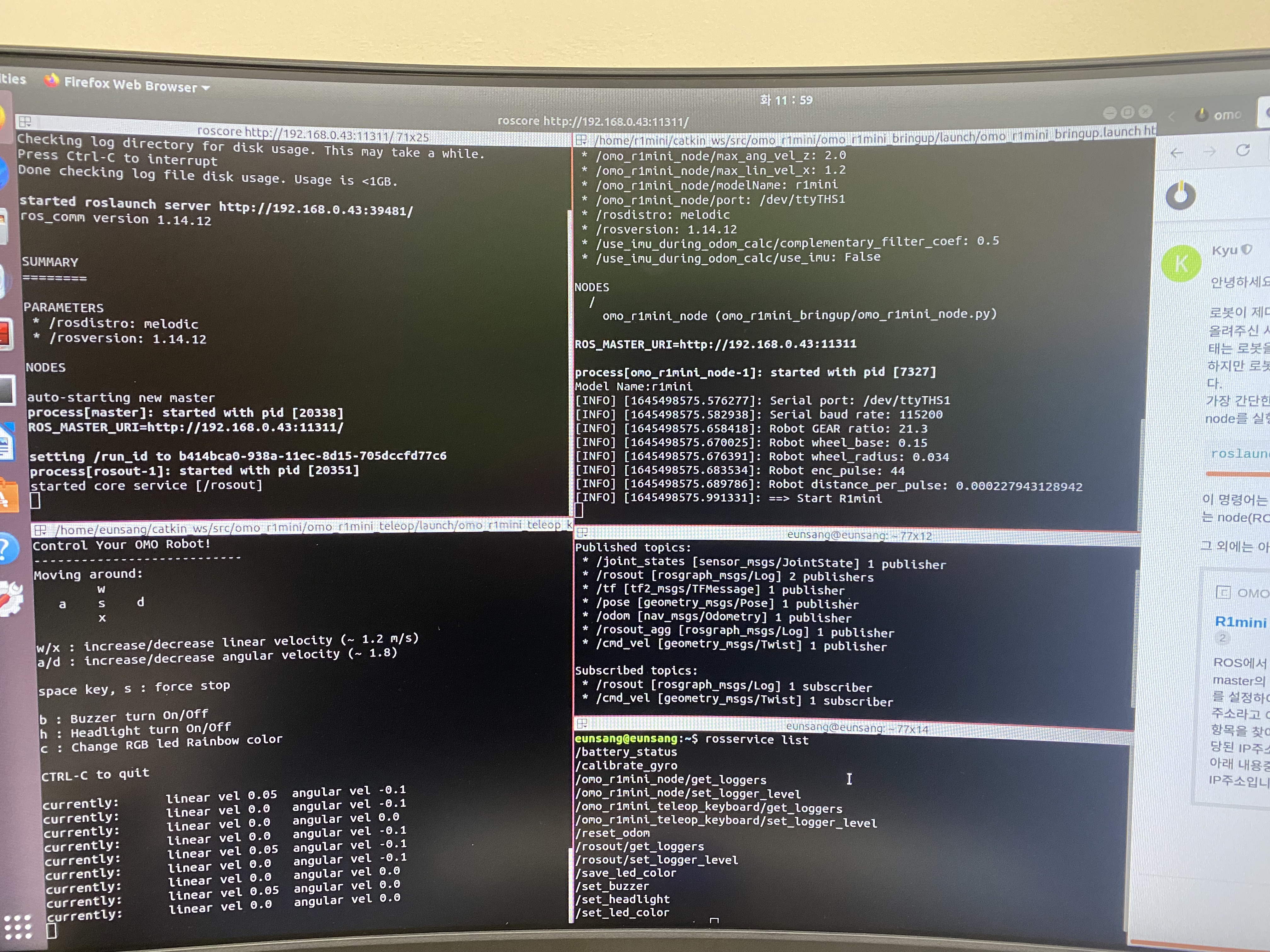
가장 간단한 방법은 omo_r1mini_teleop 에 있는 telop 조작 node를 실행하여 키보드로 조작하는 것입니다.
roslaunch omo_r1mini_teleop omo_r1mini_teleop_key.launch
이 명령어는 cmd_vel 이라는 속도제어 명령을 생성하여 전달하는 node(ROS의 프로그램 실행 단위)를 실행합니다.
그 외에는 아래 따라하기를 참조하면 됩니다.
네 bringup은 잘 실행된다고 해주셔서 다행입니다… 다만 topics와 service에서는
실행되고 있는 node들이 잘 표시가 되는데 teleop key명령을 하여도 작동이 원활히 되지 않습니다…
작동이 원활히 되지 않는다는 말은 로봇이 움직이긴 한다는 의미인가요?
정상적이라면 Teleop 노드를 켰을때 “띠리리~” 하는 소리가 들려야합니다.
아뇨 움직임도 없고 부저음향도 들리지 않았습니다.
하드웨어적 문제가 있을까요…
로봇을 켜면 아무 소리도 안나나요? 혹시 시리얼 케이블을 PC에 연결해서
R1mini 데모프로그램을 실행해보셨나요?
아래 과정을 따라서 로봇의 동작 상태를 검증해볼 수 있습니다.
가능하시면 동영상을 올려주시면 상태 파악에 도움이 될꺼 같네요.
네 해봐야 할 것 같습니다.
새 로봇으로 작동을 해보니 문제없이 동작하는 것을 확인 했습니다.
끊임없는 피드백 정말 감사합니다!!!
넵 진행과정 중 안되는 부분이 있으면 언제든 질문 주세요~