이후에 슬램에 사용할 /imu, /odom 데이터가 출력되지 않습니다.
rostopic list에는 /imu, /odom 토픽이 존재하며
rostopic echo /imu
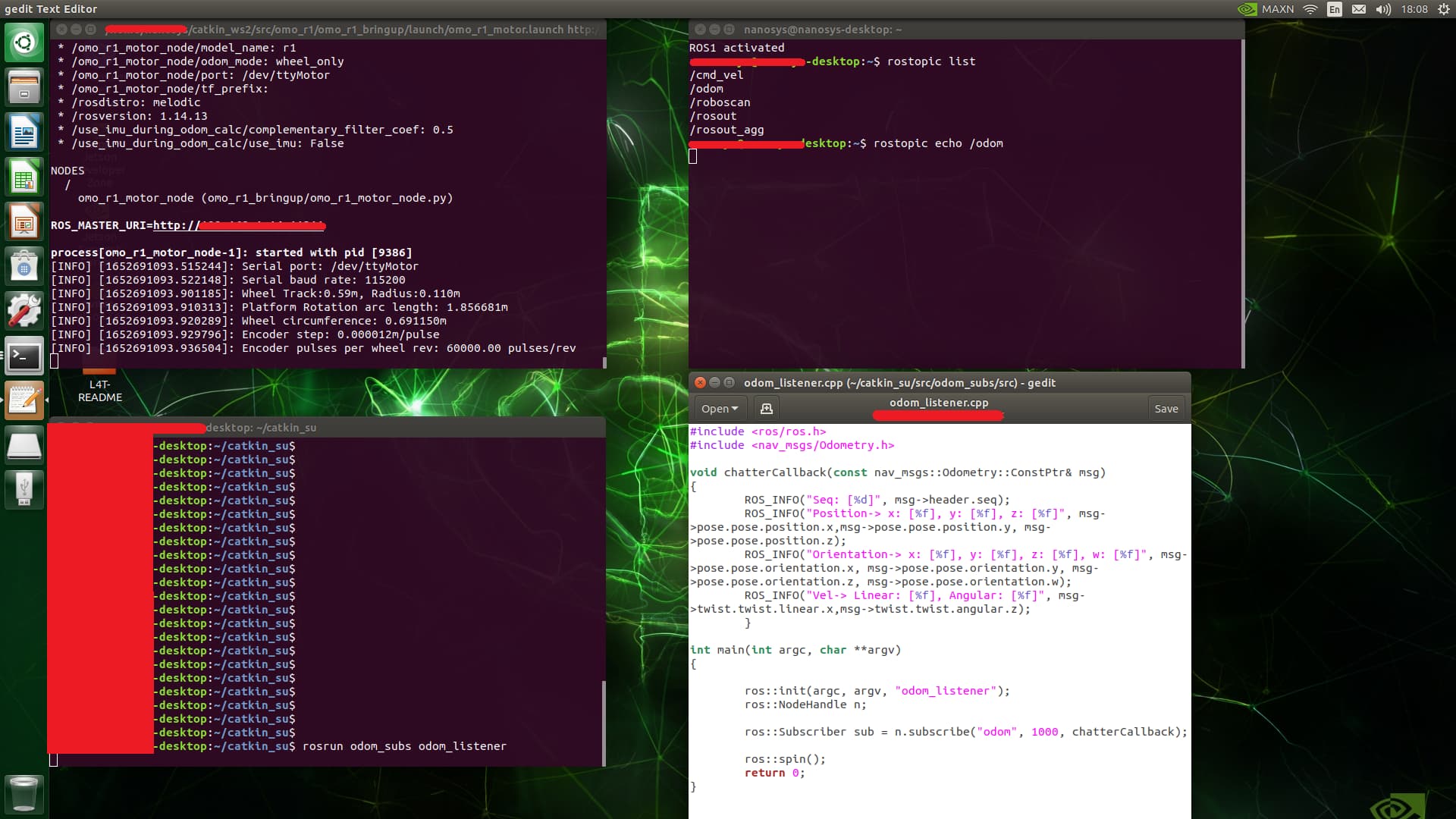
rostopic echo /odom
으로 토픽을 확인하며
roslaunch omo_r1_bringup omo_r1_motor.launch 나
roslaunch omo_r1_bringup omo_r1_imu.launch 를 사용하여도 /imu, /odom 데이터가 출력되지 않습니다.
[ERROR]
Error opening serial: [Errno 2] could not open port /dev/ttyIMU: [Errno 2] No such file or directory: ‘/dev/ttyIMU’
여기서 제가 /dev/ 디렉토리에서 목록을 확인해보니 젯슨나노와 오모로봇이 USB로 연결된 상태에서 gps2, ttyLiDAR, ttyMotor, ttyUSB1 가 추가되어있었습니다.
roslaunch omo_r1_bringup omo_r1_imu.launch 명령은 사용하지 마시고
그냥 brinup의 motor node만 실행하시면 됩니다. 그러면 r1d2에 자체 내장된 imu 센서 데이터를 사용하게 됩니다.
그리고 IMU의 pose 데이터를 얻고자 하시는 경우 /pose 토픽을 subscribe 하시면 됩니다.
주의할점은 IMU의 yaw 데이터가 자북 기준이 아닌 시작 위치를 기준으로 한다는 점입니다.
따라서 시작 위치에 따라 heading이 변경되므로 다른 reference를 가지고 offset을 주셔야 합니다. 또는 heading delta만을 이용하시는 게 좋습니다.
v2버전의 소스코드를 다운받았습니다.
명령어 rostopic list 로 /imu 가 확인 가능하지만 여전히 rostopic echo /imu로 imu 데이터가 출력되지 않습니다.
rostopic echo /cmd_vel 명령어로 로봇 제어정보는 잘 출력됩니다.
roslaunch omo_r1_bringup omo_r1_motor 명령어만으로는 /imu 데이터가 출력되지 않나요?
rostopic echo /imu 로 데이터를 확인하려 하였습니다.