현재 ttymotor ttyLiDAR 모두 잡혀있는 상태이고 YDlidar_ros_driver 모두 설치한 상태입니다
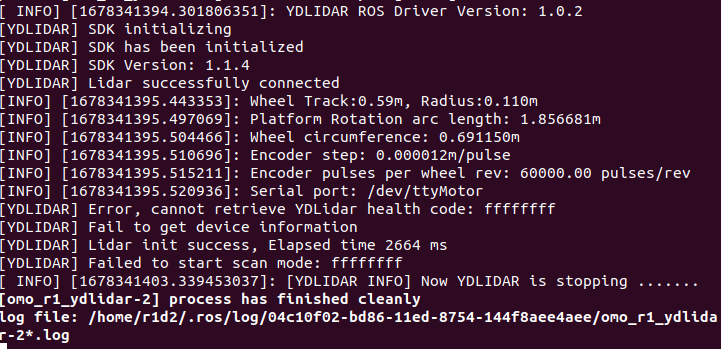
이후 robot_G2 실행시 아래와 같이 라이더가 멈춥니다
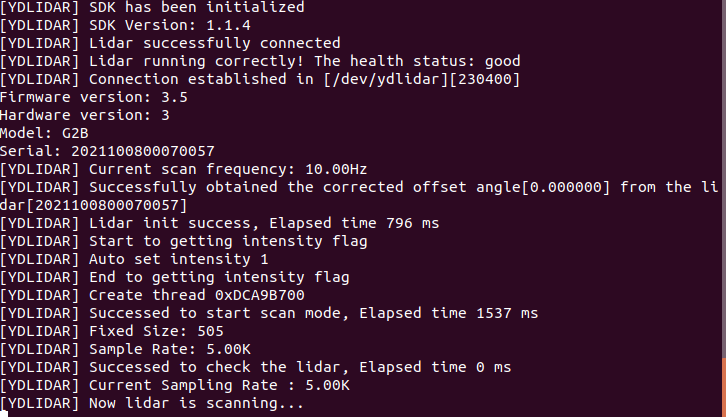
따로 G2 라이다만 실행시켰을 때 아래 사진과 같이 정상작동합니다
마지막 사진은 lidar lanch 파일입니다 해결방법이 무엇이 있을까요