안녕하세요!
omo_r1_motor.launch 파일에 <arg name="set_port" default="/dev/ttyMotor"/> 부분을 확인해보시면 포트가 ttyMotor로 설정되어있습니다.
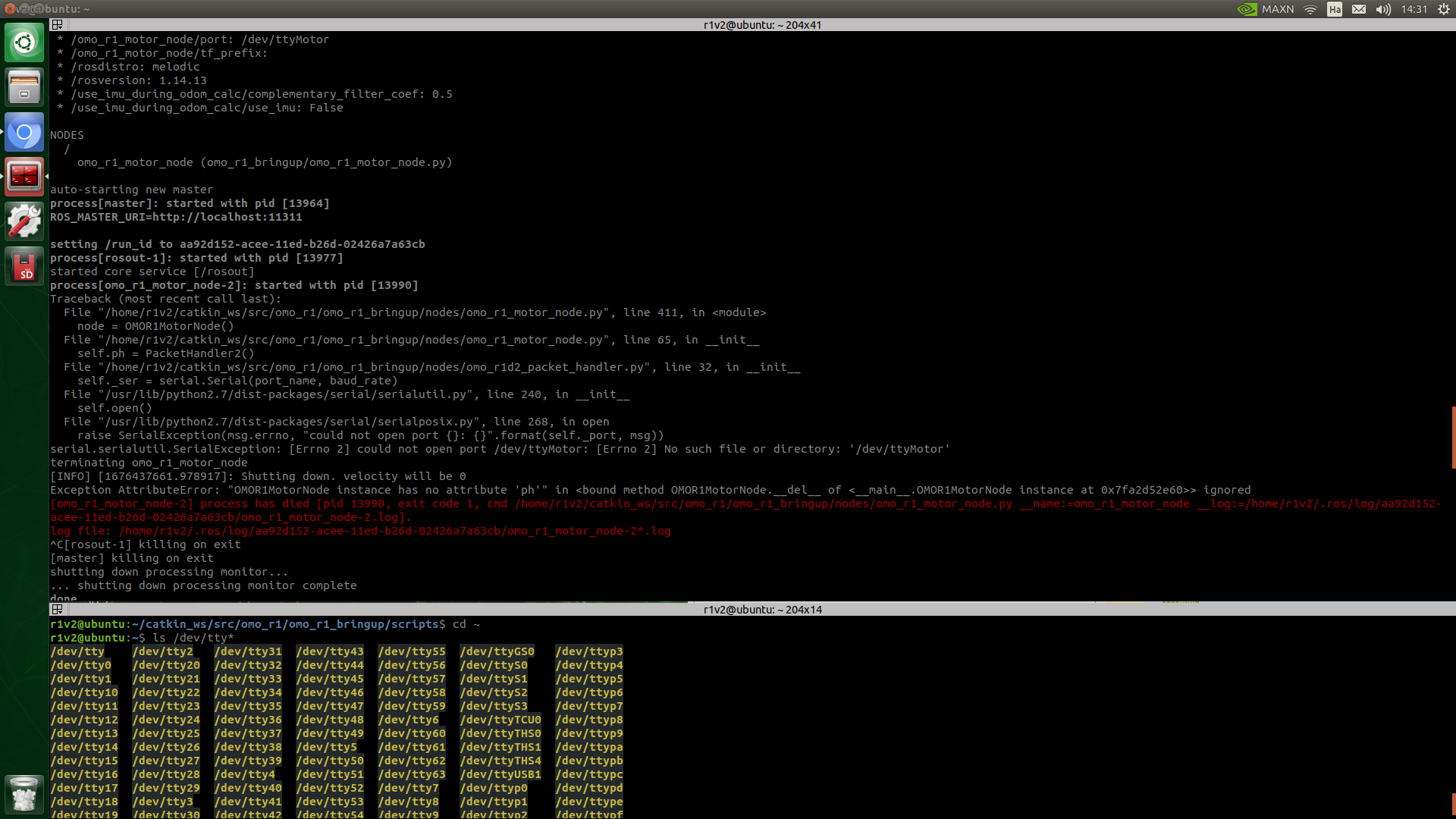
현재 ttyMotor 포트가 잡혀있지 않아 실행 시, 에러가 발생할 것입니다.
현재 ttyUSB1으로 잡히는 포트를 ttyMotor로 바꾸시려면 UDEV설정을 해주셔야 합니다. UDEV설정 링크 참고하셔서 포트명 변경 진행해주시면 됩니다.
답변 감사드립니다
sudo nano /etc/udev/rules.d/98-omo-r1.rules 로 확인 결과 KERNELS과 달라 ttyMotor이 잡히지 않았습니다
udevadm info -a /dev/ttyUSB* 명령으로 현재 USB장치의 KERNELS 확인 후
98-omo-r1.rules 파일의 KERNELS을 변경해주니 잘 작동합니다
감사합니다!!
더불어 한가지 더 질문이 있습니다
create_udev_rules.sh 파일을 열어보면 라이다 부분의 룰 파일이 ydlidar.rules 로 되어 있는데
실제 경로로 들어가보면(/etc/udev/rules.d/) 97-ydlidar.rules 로 되어 있습니다
그럼 create_udev_rules.sh 의 ydlidar.rules도 97-ydlidar.rules로 변경해야 하는거 아닌지요
현재 라이다는 ls /dev/tty*로 검색 시 변경되지 않고 있습니다
확인 부탁드립니다. 감사합니다