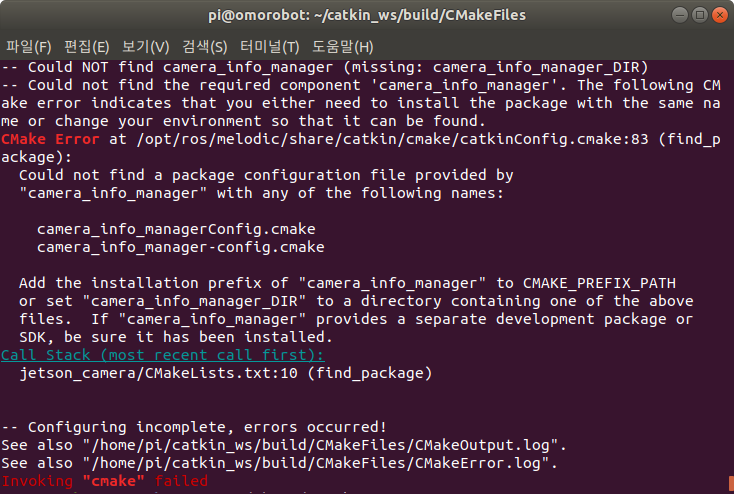
raspberrypi4에서 e메뉴얼에서 'R1MINI CAMERA 다루기’를 따라하여 catkin build jetson_camera를 했으나 명령어가 먹질않아서 catkin_make를 했는데 아래 사진과 같이 에러가 뜹니다.
라즈베리파이는 젯슨나노와 다른 방식으로 카메라가 동작합니다.
만약 아래 이미지를 사용하시는 경우 다음을 수행하시기 바립니다.
먼저 카메라가 정상적으로 설치되었는지 확인합니다.
라즈베리파이 카메라를 위한 ROS 패키지는 다음과 같습니다.
이 패키지를 빌드하기 위해서 다음을 수행합니다.
catkin_ws/src 폴더로 이동하여 다음 추가 패키지를 다운로드합니다.
$ git clone https://github.com/UbiquityRobotics/raspicam_node.git -b raspicam_flip
$ git clone https://github.com/ros-perception/image_transport_plugins.git -b indigo-devel
$ git clone https://github.com/ros-perception/image_common.git -b hydro-devel
그리고나서 다시 catkin_ws로 이동하여 catkin_make를 수행합니다.
빌드가 성공적으로 이루어지면
roscore를 띄운 상태에서 터미널에 다음을 입력합니다.
$ roslaunch raspicam_node camerav2_1280x960.launch
그리고 rqt_image_viewer를 띄우면 아래와 같이 영상을 확인할 수 있습니다.

만약 영상이 뒤집혀서 나오는 경우 camerav2_1280x960.launch 파일을 열어 다음 항목을 수정합니다.
<arg name="vFlip" default="true"/>
1개의 좋아요