안녕하세요.
R1을 사용하고 있는데 궁금한 점이 있습니다.
제공된 컨트롤러가 아닌 teleop 또는 다른 방식으로 무선으로 로봇을 제어할 수 있는 방법이 있나요?
안녕하세요,
기본 R1 패키지에는 omo_r1_teleop_key.launch 파일이 있어서
$ roslaunch omo_r1_teleop omo_r1_teleop_key.launch
와 같이 입력하면 키보드를 사용하여 원격으로 조작할 수 있습니다.
또는 아래를 참고하여 xbox와 같은 조이스틱으로 조작하는것도 가능합니다.
http://wiki.ros.org/joystick_drivers
자세한 방법은 다음 코드를 참조하시면 됩니다.
안녕하세요. 답변해주신 것 참고하여서 로봇을 제어하는 데에 성공하였습니다. 감사합니다.
추가로 궁금한 점이 있는데 조이스틱(페달)으로 로봇을 제어할 때 무선으로 제어할 수 있는 방법(조이스틱이 로봇pc와 유선 연결을 하지 않을 방법)이 있을까요?
원격 구동을 하는 방법 밖에 없는 걸까요…?
로봇 제어에 성공하셨다니 다행입니다.
그런데 질문하신 내용이 잘 이해가 가지 않습니다.
조이스틱으로 무선으로 제어하고싶으신데 원격 구동(wifi를 통한 연결)이 아닌 다른 방법이 있는가 하는 질문이 맞나요?
아마도 bluetooth 조종기 같은 무선 조종기를 사용하면 될꺼 같긴 하네요.
제가 배우는 입장이고 잘 모르는 지라 설명이 미숙한 점 죄송합니다.
사이트에 올라와 있는 메뉴얼을 보고 제가 이해한 바로는 로봇을 어떠한 형태로 제어하든지 간에 로봇과 연결된 pc가 따로 필요한 것(시리얼 통신)으로 보였습니다.
제가 궁금한 점은 '로봇에 내장된 보드(?)에 접근하여 제어가 가능한가’입니다.
R1mini 에는 별도로 ESP-12라고 하는 아듀이노 기반의 IOT 장비가 탑재 가능합니다.
그리고 아듀이노 프로그램을 통해 시리얼 포트로 제어 명령을 보내서 직접 제어도
가능은 합니다.
아래 글 참조하세요.
그리고 참조 소스코드는 여기서 다운로드 가능합니다.
친절한 답변 감사드립니다.
추가로 질문 드릴게 있는데 그러면 'esp12보드와 같은 wifi 모듈을 R1에 꽂아서 사용할 수 있다’는 의미로 이해하면 되는건가요…?
네 정확하게는 R1mini의 전용 포트에 꽂으면 됩니다.

프로그램은 좌측의 마이크로 usb 포트로 하시면 되고요.
제가 현재 사용하고 있는 로봇은 R1mini가 아닌 R1입니다.
앗 그러시군요. R1에는 PC에서 직접 시리얼 통신 프로토콜에 따라서 명령을 전송하면 됩니다.
그러면 RS232 케이블을 연결하지 않고 로봇을 제어하는 방법은 없다는 걸로 이해하면 되는 걸까요…?
만약 CAN 통신 제어가 가능하신경우 CAN 메세지로 제어 가능합니다.
또한 현재 업데이트된 R1v2에서는 TTL 레벨로 제어 가능하게끔 만들어져있습니다.
can 통신이라는 개념을 찾아보니 차량 내부 통신 프로토콜이라고 나옵니다.
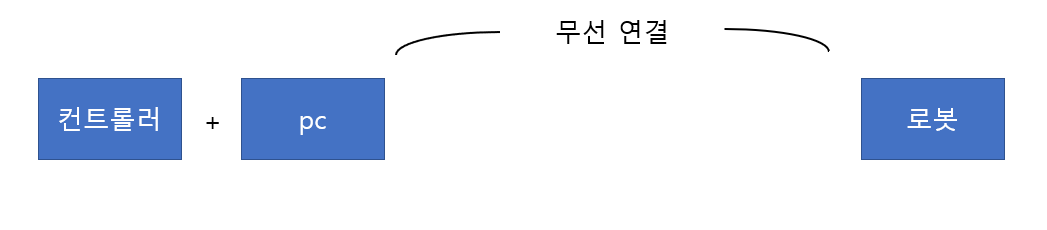
저는 외부(pc)에서 로봇을 무선으로 제어를 할 수 있는지 궁금합니다. (첨부한 사진과 같이 제어가 가능하지 궁금합니다.)
제가 질문을 이해하기 어렵게 쓴 거 같아 죄송합니다.
제가 가지고 있는 컨트롤러(페달)는 usb adapter를 통해 pc에 연결이 되어있습니다.
네 CAN 역시 유선으로 동작합니다.
따라서 중간에 시리얼 포트로 명령을 내보내고 무선으로 통신이 가능한 제어기가 필요합니다.
보통 이렇게 구성이 됩니다.
페달 → PC <—무선(블루투스 또는 wifi)–> 제어기 – (시리얼포트)–> 로봇
안녕하세요. 혹시 말씀하신 제어기가 can analyzer를 의미하는 걸까요…?..
추가로 r1 리모컨은 로봇과 어떤 식으로 통신하는지 궁금합니다.

R1의 리모컨은 SBUS라는 통신 규격을 입력받습니다.
이 프로토콜은 RC조종기 특히 Futaba에서 사용하는 규격으로 자세한 내용은 다음을 참조하시기 바랍니다.
https://www.espruino.com/SBus
로봇에 장착된 RC수신기 대신 해당 명령을 전달하면 됩니다.
다만 일반적인 시리얼 통신이 아닌 반전된 신호를 전달해야 하고 even parity, 2 stop bits, 100000 baud 규격을 만족해야합니다.
이러한 형태의 무선 통신 기기를 사용해도 됩니다.
답변 감사합니다. 정말 많은 도움이 되었습니다:)