안녕하세요
R1mini 로봇의 wheel odom 과 외부 IMU 센서를 robot_localization EKF 패키지로 odom/filtered 토픽을 출력했습니다.
이 토픽을 기존TF tree 구조 odom → base_footprint → base_link 에서 odom 을 대체할 수 있는 방법이 있을까요???
아니면 새로이 odom/filtered → base_link2 → laser_link 구조를 만드는 것이 나을까요??
안녕하세요
R1mini 로봇의 wheel odom 과 외부 IMU 센서를 robot_localization EKF 패키지로 odom/filtered 토픽을 출력했습니다.
이 토픽을 기존TF tree 구조 odom → base_footprint → base_link 에서 odom 을 대체할 수 있는 방법이 있을까요???
아니면 새로이 odom/filtered → base_link2 → laser_link 구조를 만드는 것이 나을까요??
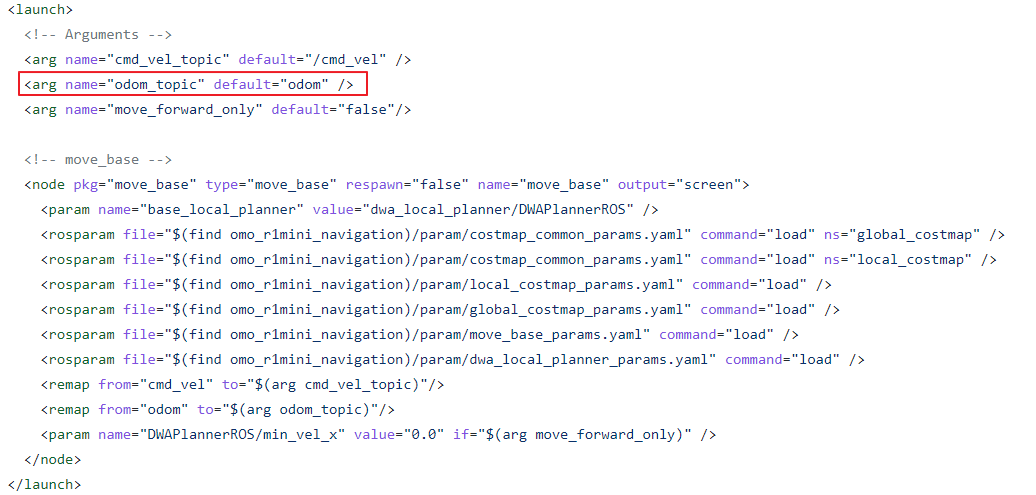
실행하시고자 하는 네비게이션 launch 파일의 내용을 수정하시면 어떨까요?
예를들어 omo_r1mini_navigation의 launch파일 내용 중
omo_r1mini/omo_r1mini_navigation/launch/move_base.launch
다음 부분을 odom/filtered 로 변경하면 되지 않을까 싶은데, 한번 해보고 잘 되는지 알려주시면 좋겠네요.
안녕하세요 예전에 cyglidar 이 장착된 로봇이 나온 적 있다고 들었는데 슬램 파라미터 조정에 대해서 도움 받을 수 있을까요???
그리고 r1mini bringup 했을 때 tf tree 를 보면 base_footprint 와 base_link 사이의 tf average rate: 0.0 으로 나옵니다.
위의 odom 과 base_footprint 는 40 정도 나오구요
average rate 가 어느정도는 나와야하지 않나요?
그리고 휠 오돔의 공분산 계산 방법이 있을까요??
한번 이 문서를 참고해보시면 좋겠네요