Yoo
#1
현재 ros melodic 버전 사용중이고 remote pc와 로봇에 모두 r1패키지 설치 하였습니다
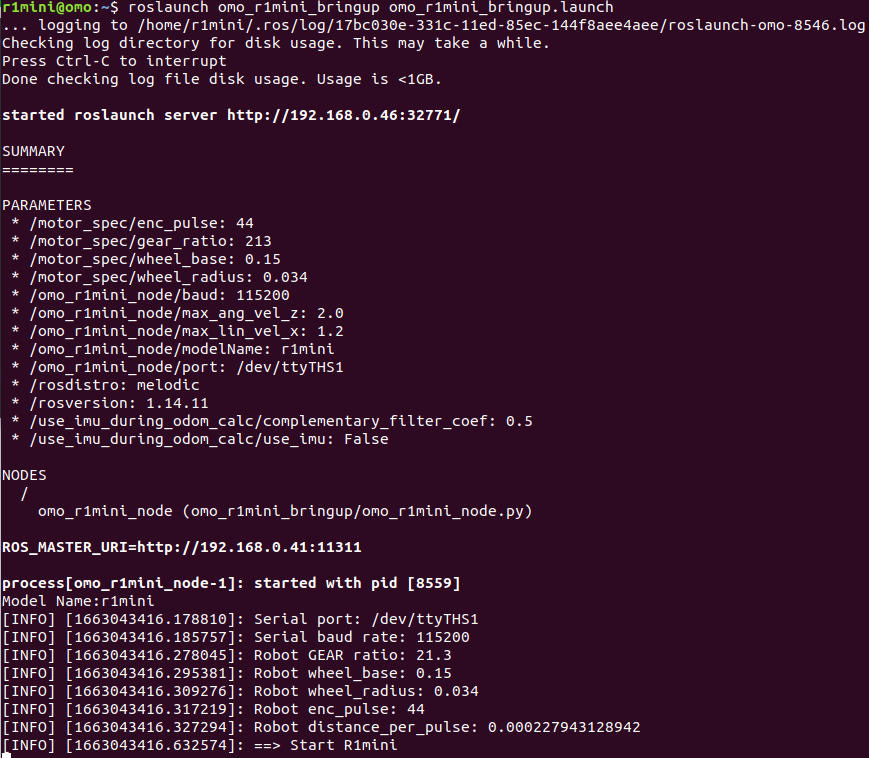
ip 도 로봇과 pc 위치에 맞게 설정하였습니다 그 후 bringup 하였습니다
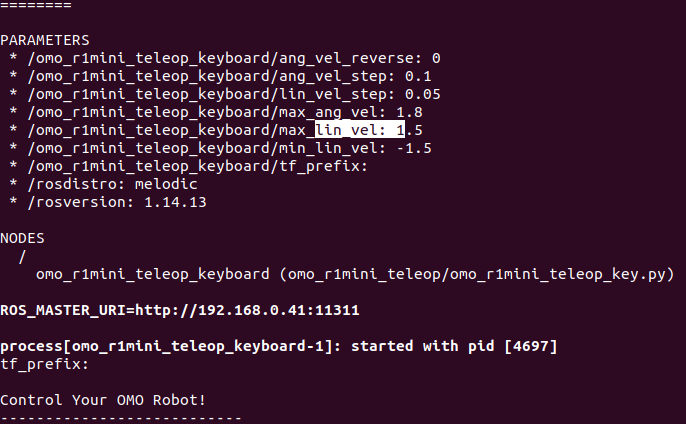
그후 teleop_keyboard 실행하였습니다
이후 연동시 로봇이 작동되지 않습니다.
이후 카메라 테스트를 위해 jetson_camera 작동시
오류가 발생하였습니다.
teleop 과 카메라 모두 패키지나 노드의 위치를 찾지 못하는것 같습니다.
어떻게 해야 실행위치를 변경할수있을 까요
확인이 필요한 부분을 보내드리도록 하겠습니다 감사합니다
저도 동일한 에러로 고생을 꽤나 했었거든요…
해당 링크의 게시물의 이미지로 Micro SD카드를 다시 이미징 하셔서 시도해보시기 바랍니다.
다른 기타 SD카드는 안되고 해보니 샌디스크의 32GB Micro SD 카드의 경우 이미징이 되더라구요.
댓글을 달고있는 저는 (SanDisk MicroSDHC Class10 Ultra 32GB) 의 제품으로 이미징을 성공하였습니다.
결론은 패키지의 bringup 부분과 opencv의 문제였던걸로 기억합니다.
해당 링크의 이미지에는 모든 오류가 수정되어 있습니다.
http://omorobot1.synology.me/t/r1mini-os/217/2
1개의 좋아요
Kyu
#5
안녕하세요,
일단 R1mini 로봇은 r1 패키지와 유사하지만 다른 구조를 가지고 있습니다.
아래 링크를 참조하시고 설치하신 패키지를 다시한번 확인해보시기 바랍니다.
그리고 카메라 관련은
catkin_ws/src 디렉토리에 jetson_cameraa 패키지가 있는지 확인해보시기 바랍니다.
또는 아래 명령어로 실행해보시면 어떻게 나오나요?
roslaunch omo_r1mini_bringup omo_r1mini_camera.launch
Kyu
#6
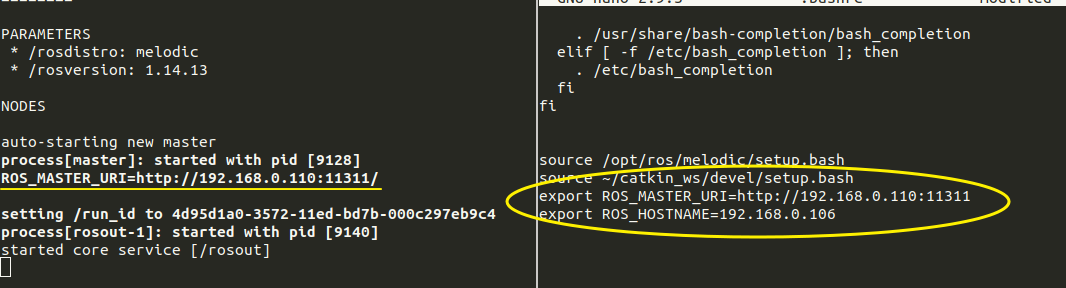
roscore의 ROS_MASTER_URI 포트와
노드의 포트가 다르게 설정되어있는거 같습니다.

이렇게 되어있으면 서로 통신을 할 수 없는데 혹시 다른 포트를 사용하시는 이유가 있으실까요?
Yoo
#7
r1mini started roslaunch sever 또한 pc의 아이피로 접속되어야 하나요?
현재 아이피 설정 상태입니다 0.41이 pc ip 0.46이 로봇의 ip 입니다
제가 임의로 포트를 다르게 지정하지 않았습니다
두개의 아이피가 같아야 한다면 bringup의 ip를 어떻게 바꿀수 있나요
Kyu
#8
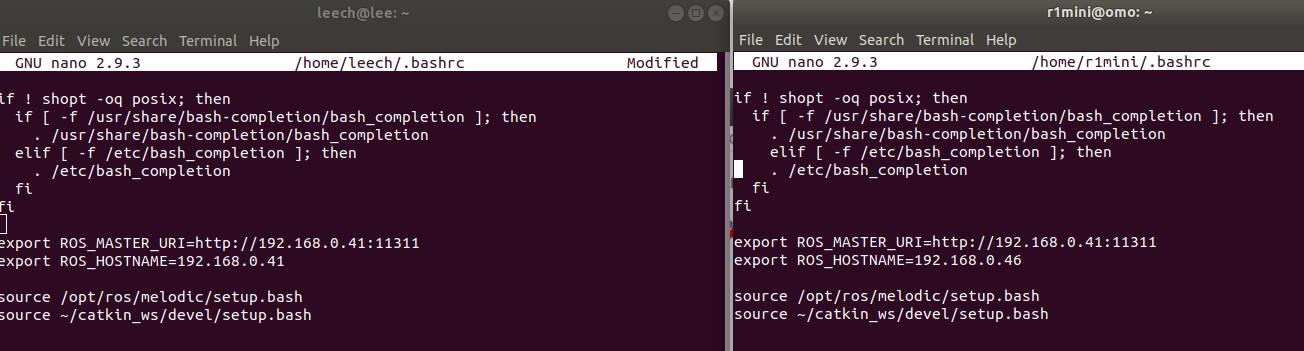
왼쪽이 roscore의 ROS_MASTER_URI 이고 오른쪽은 R1mini의 bashrc 상태입니다.
그리고나서 다시 r1mini_bringup launch 한 상태입니다.
아래 왼쪽은 teleop_keyboard 이고요.
아래와 같이 뜨면 정상적으로 키보드로 조작이 가능합니다.
bringup 파일에 수정한 부분은 없습니다. 그냥 .bashrc의 설정을 ROS_MASTER_URI의 IP 주소로 설정하시면 됩니다.